Робот едет по линии своими руками

Самодельный робот следующий по линии
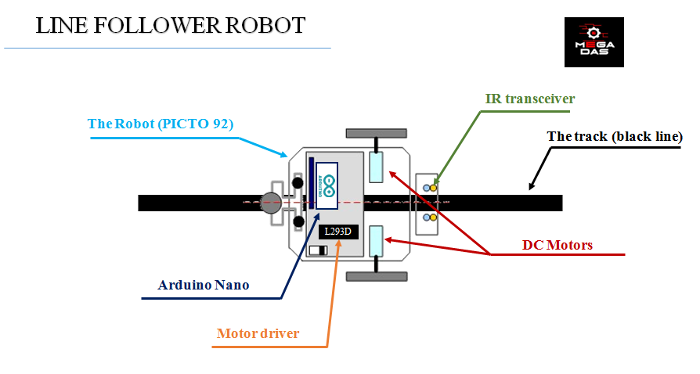
Движущийся вдоль линии робот представляет собой механизм, который способен следовать вдоль черной или белой линии. Существуют две разновидности подобных роботов: одна предназначена для следования вдоль черной линии, а другая — вдоль белой. Фактически, робот как бы "чувствует" линию едет вдоль нее. Также на нашем сайте можно прочитать статью о роботе, следующем вдоль линии, построенном на микроконтроллере AVR ATmega Механизм действия робота, движущегося вдоль линии, основан на физических принципах распространения и отражения света световых волн.









Создадим робота на основе платы Ардуино Уно, который будет обнаруживать линию на полу и перемешаться по ней. Это продолжение темы роботов, которые следуют линии или за хозяином. У нас уже было на сайте два урока:.



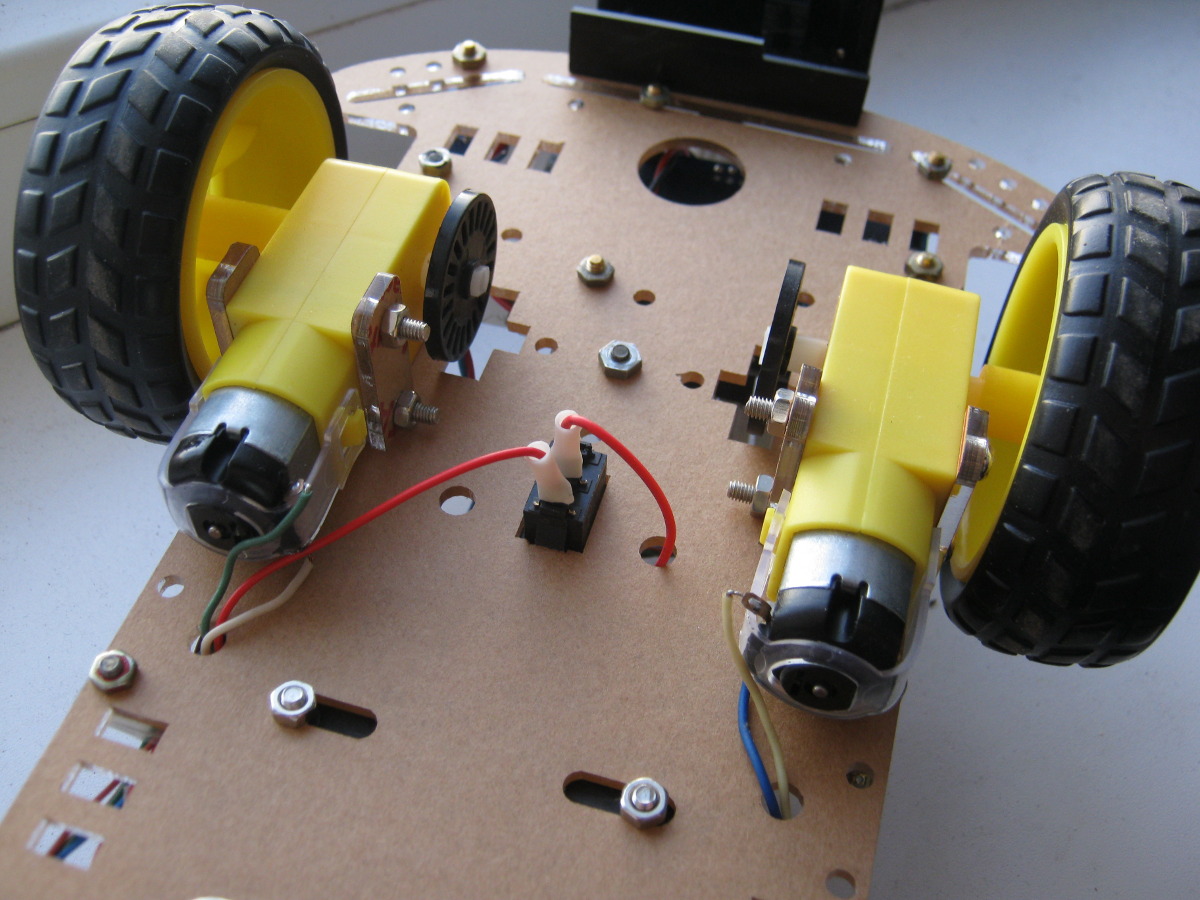



В этом уроке мы создадим машинку, которая будет ездить по траектории нарисованной линии, а также останавливаться при обнаружении препятствий. При создании любого робота, его нужно оснастить датчиками показания которых будет считывать робот , управляющими модулями для вывода результатов работы робота , и скетчем по алгоритму которого должен работать робот. В нашем случае, мы оснастим машинку, тремя аналоговыми датчиками линий и одним ультразвуковым датчиком расстояния , а в роли управляющих модулей выступят два закрепленных к каркасе моторчика , с колёсами на валах. Моторчики подключаются к клеммам M1 левый мотор и M2 правый мотор расположенным на Motor Sield.